from pylab import *
from pyndamics3 import Simulationpyndamics3 version 0.0.31from pylab import *
from pyndamics3 import Simulationpyndamics3 version 0.0.31K=10
sim=Simulation()
sim.add("y'=a*y*(1-y/K)",initial_value=1,plot=False)
sim.params(a=0.5,K=K)
sim.run(50)
plot(sim.t,sim.y)
sim=Simulation()
sim.add("y'=a*y*(1-y/K)",initial_value=0,plot=False)
sim.params(a=0.5,K=K)
sim.run(50)
plot(sim.t,sim.y,'r--')
text(0,0.5,'initial $y=0$')
sim=Simulation()
sim.add("y'=a*y*(1-y/K)",initial_value=K,plot=False)
sim.params(a=0.5,K=K)
sim.run(50)
plot(sim.t,sim.y,'r--')
text(0,9.5,'initial $y=K$')Text(0, 9.5, 'initial $y=K$')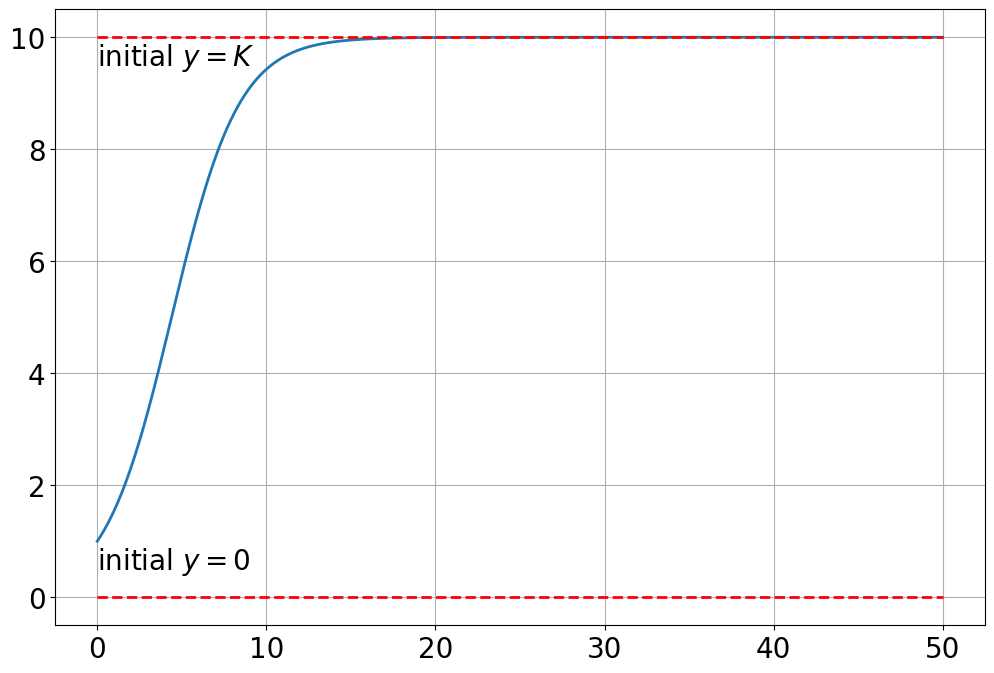
\[ y'=ay(1-y/K) \]
Stability, look at
\[ J\equiv \frac{\partial y'}{\partial y} = a - 2ay/K \] evaluated at each fixed point, and see if it is positive (unstable) or negative (stable) or zero (neutral.
\[ J|_{y=0}= a - 2a\cdot 0/K = a \] which is greater than zero, so the \(y=0\) fixed point is unstable.
\[ J|_{y=K}= a - 2a\cdot K/K = -a \] which is less than zero, so the \(y=K\) fixed point is stable.
sim=Simulation()
sim.add("x'=a*x -b*x*y",initial_value=1,plot=False)
sim.add("y'=+c*x*y - d*y",initial_value=1,plot=False)
sim.params(a=2,b=3,c=4,d=5)
sim.run(10)
plot(sim.t,sim.x)
plot(sim.t,sim.y)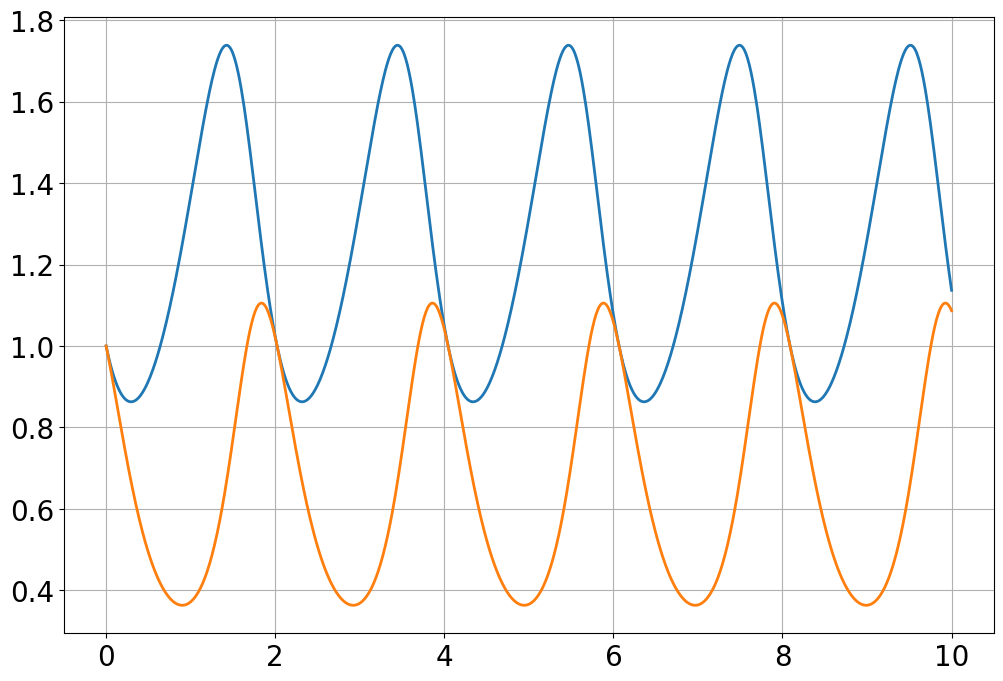
a=2
b=3
c=4
d=5
sim=Simulation()
sim.add("x'=a*x -b*x*y",initial_value=1,plot=False)
sim.add("y'=+c*x*y - d*y",initial_value=1,plot=False)
sim.params(a=a,b=b,c=c,d=d)
sim.run(10)
plot(sim.t,sim.x)
plot(sim.t,sim.y)
sim=Simulation()
sim.add("x'=a*x -b*x*y",initial_value=0,plot=False)
sim.add("y'=+c*x*y - d*y",initial_value=0,plot=False)
sim.params(a=a,b=b,c=c,d=d)
sim.run(10)
plot(sim.t,sim.x,'c--')
plot(sim.t,sim.y,'r:')
text(0,0.05,'initial $x=0,y=0$')
sim=Simulation()
sim.add("x'=a*x -b*x*y",initial_value=d/c,plot=False)
sim.add("y'=+c*x*y - d*y",initial_value=a/b,plot=False)
sim.params(a=a,b=b,c=c,d=d)
sim.run(10)
plot(sim.t,sim.x,'c--')
plot(sim.t,sim.y,'r:')
text(0,1.3,'initial $x=d/c,y=a/b$')Text(0, 1.3, 'initial $x=d/c,y=a/b$')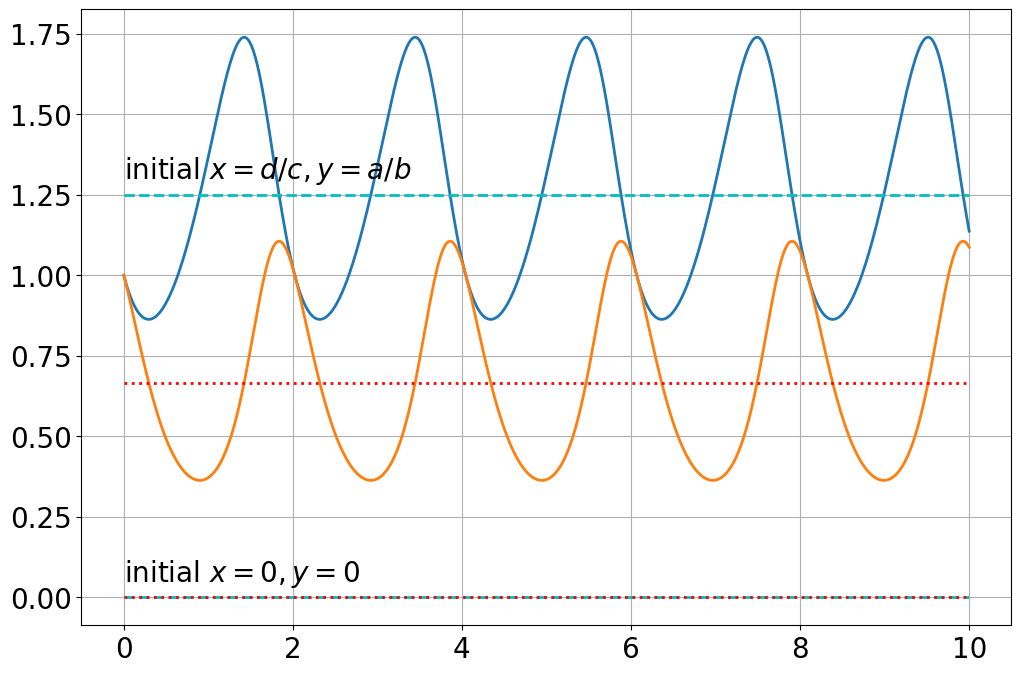
vector_field(sim,rescale=True,x=linspace(0,2,20),y=linspace(0,2,20))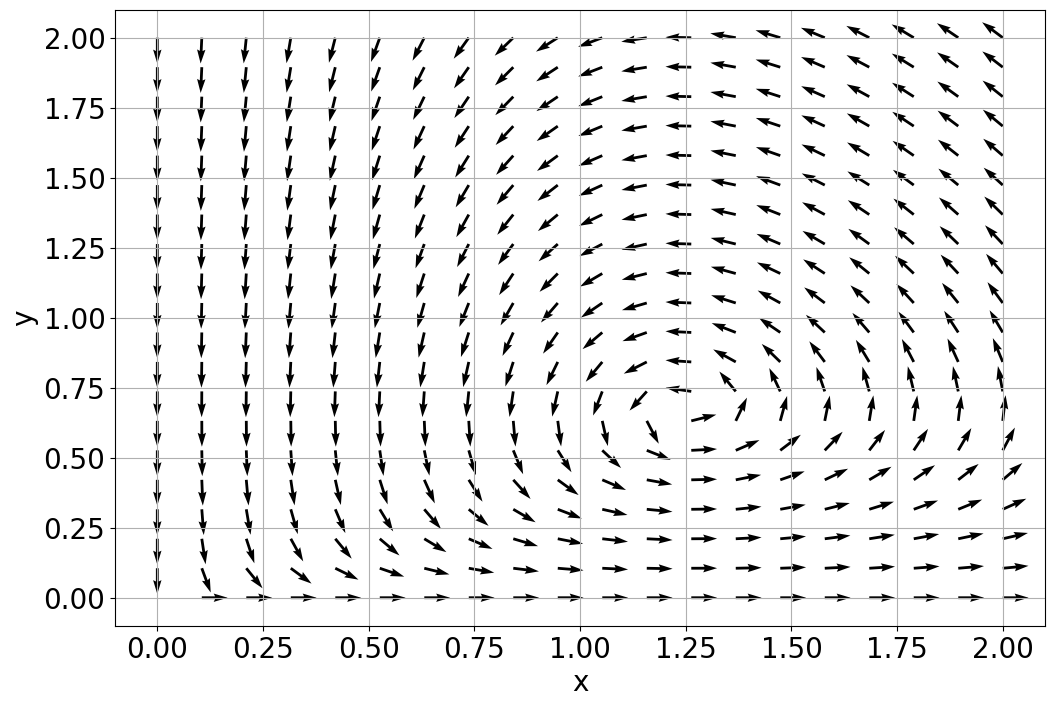
import sympy as sp
import numpy as np
x,y=sp.symbols('x,y', real=True,positive=True)
a,b,c,d=sp.symbols('a,b,c,d', real=True,positive=True)f1=a*x - b*x*y
f2=c*x*y - d*y
f1x=sp.diff(f1,x)
f1y=sp.diff(f1,y)
f2x=sp.diff(f2,x)
f2y=sp.diff(f2,y)J=sp.Matrix([[f1x,f1y],[f2x,f2y]])
J\(\displaystyle \left[\begin{matrix}a - b y & - b x\\c y & c x - d\end{matrix}\right]\)
J1=J.subs({x:0,y:0})
J1\(\displaystyle \left[\begin{matrix}a & 0\\0 & - d\end{matrix}\right]\)
J2=J.subs({x:d/c,y:a/b})
J2\(\displaystyle \left[\begin{matrix}0 & - \frac{b d}{c}\\\frac{a c}{b} & 0\end{matrix}\right]\)
J2.eigenvals(){-I*sqrt(a)*sqrt(d): 1, I*sqrt(a)*sqrt(d): 1}J2.diagonalize()(Matrix([
[-I*b*sqrt(d)/(sqrt(a)*c), I*b*sqrt(d)/(sqrt(a)*c)],
[ 1, 1]]),
Matrix([
[-I*sqrt(a)*sqrt(d), 0],
[ 0, I*sqrt(a)*sqrt(d)]]))From https://math.libretexts.org/Bookshelves/Differential_Equations/A_First_Course_in_Differential_Equations_for_Scientists_and_Engineers_(Herman)/07%3A_Nonlinear_Systems/7.05%3A_The_Stability_of_Fixed_Points_in_Nonlinear_Systems
\[ x'=-2x -3xy \]
\[ y'=3y-y^2 \]
sim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=1,plot=False)
sim.add("y'=3*y - y**2",initial_value=1,plot=False)
sim.run(4)
plot(sim.t,sim.x)
plot(sim.t,sim.y)
## FP are (0,0) and (0,3)
sim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=0,plot=False)
sim.add("y'=3*y - y**2",initial_value=0,plot=False)
sim.run(4)
plot(sim.t,sim.x,'c--')
plot(sim.t,sim.y,'r:')
sim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=0,plot=False)
sim.add("y'=3*y - y**2",initial_value=3,plot=False)
sim.run(4)
plot(sim.t,sim.x,'c--')
plot(sim.t,sim.y,'r:')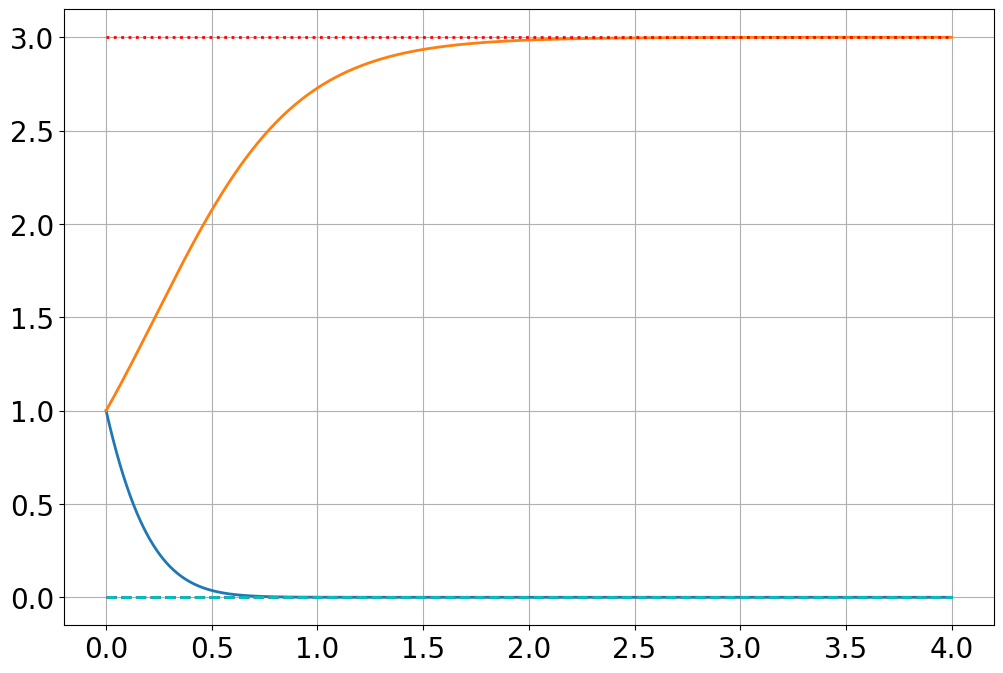
sim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=1,plot=False)
sim.add("y'=3*y - y**2",initial_value=1,plot=False)
sim.run(4)
plot(sim.t,sim.x)
plot(sim.t,sim.y)
## FP are (0,0) and (0,3)
FP=(0,0)
for dx in [-.1,.1]:
for dy in [-.1,.1]:
sim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=FP[0]+dx,plot=False)
sim.add("y'=3*y - y**2",initial_value=FP[1]+dy,plot=False)
sim.run(.8)
plot(sim.t,sim.x,'c--')
plot(sim.t,sim.y,'r:')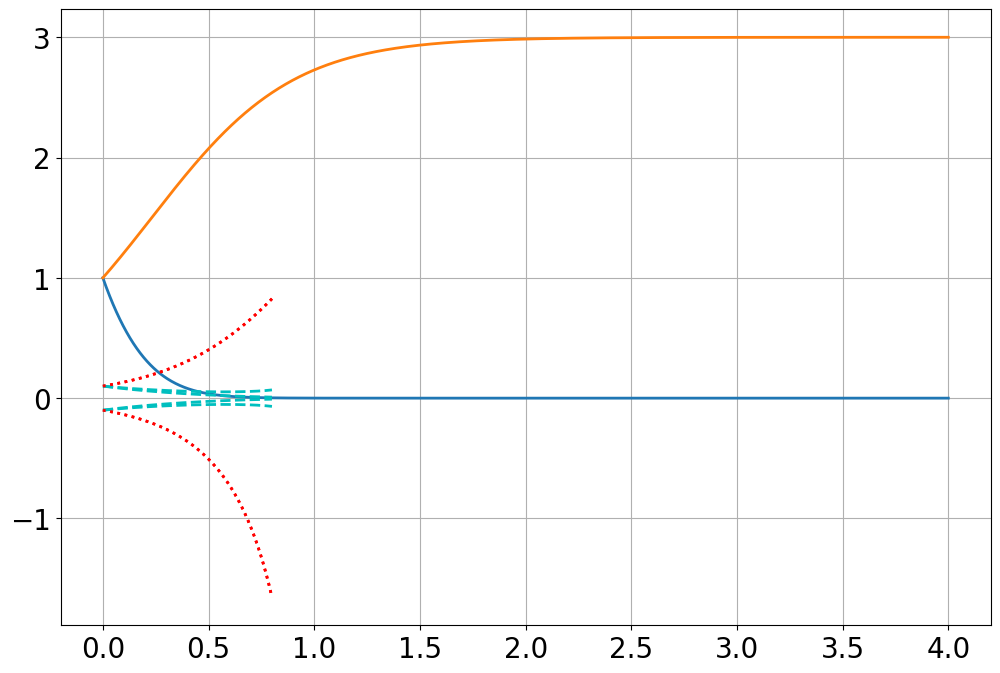
from pyndamics3 import phase_plotsim=Simulation()
sim.add("x'=-2*x -3*x*y",initial_value=.1,plot=False)
sim.add("y'=3*y - y**2",initial_value=.1,plot=False)
sim.run(4)
phase_plot(sim,'x','y')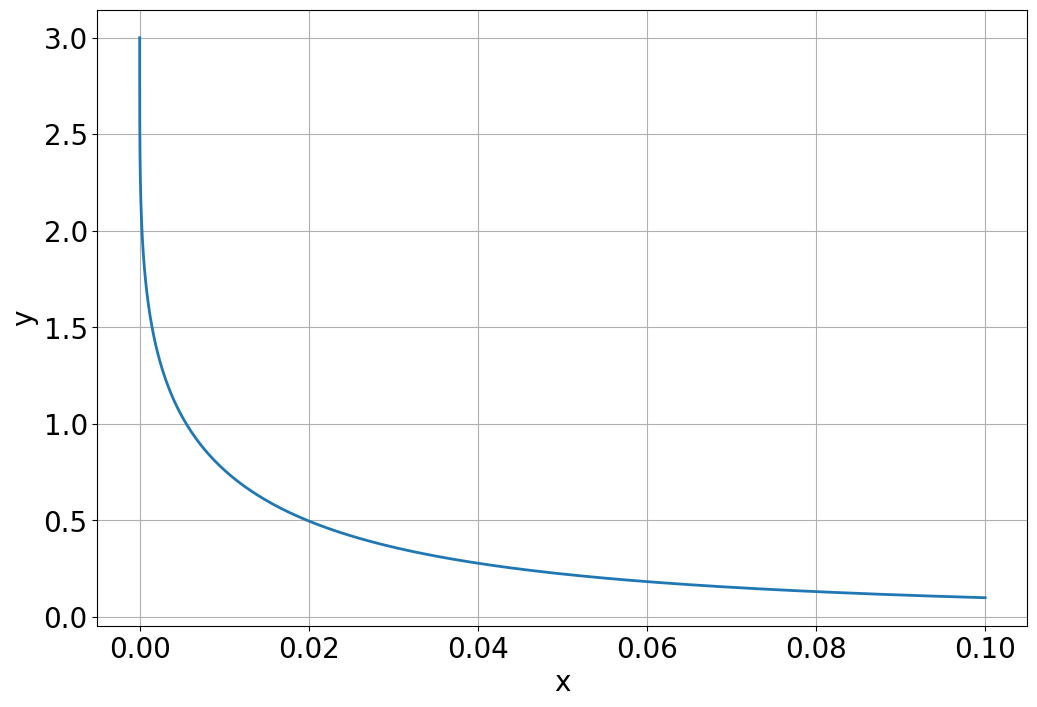
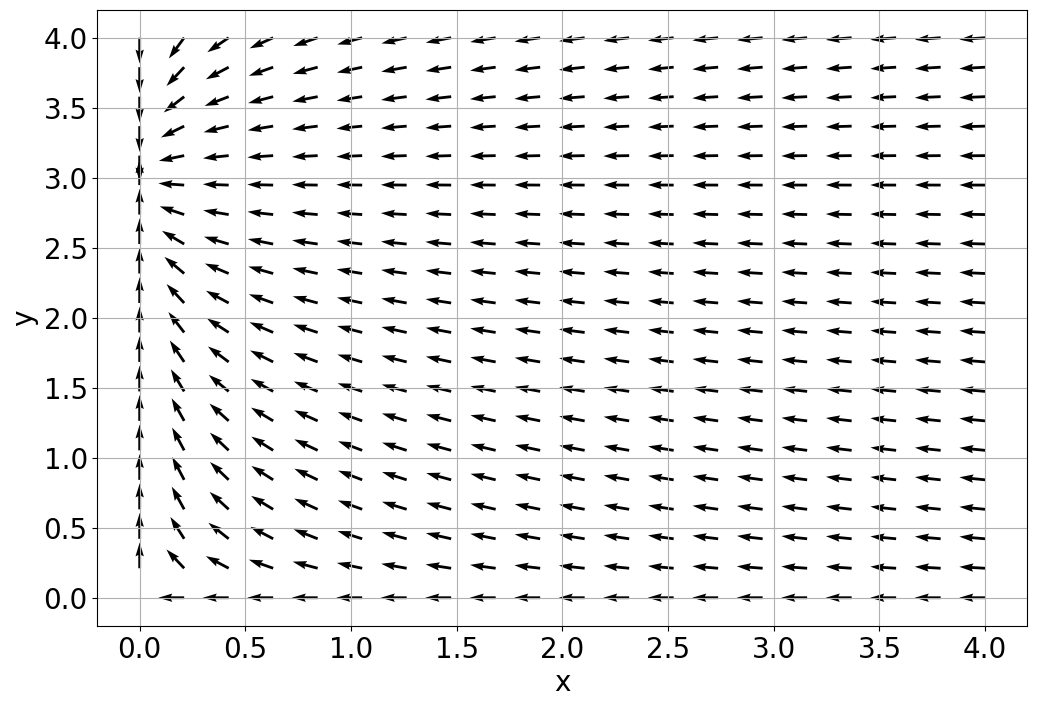
vector_field(sim,rescale=True,x=linspace(0,4,20),y=linspace(0,4,20))